Page Not Found
Page not found. Your pixels are in another canvas.

A list of all the posts and pages found on the site. For you robots out there is an XML version available for digesting as well.
Page not found. Your pixels are in another canvas.
About me
This is a sample blog post. Lorem ipsum I can’t remember the rest of lorem ipsum and don’t have an internet connection right now. Testing testing testing this blog post. Blog posts are cool.
R. Buchanan, M. Camurri, M. Fallon. “Haptic Sequential Monte Carlo Localization for Quadrupedal Locomotion in Vision-Denied Scenarios” IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2020 pp. 3657-3663, doi: 10.1109/IROS45743.2020.9341128.
R. Buchanan, M. Camurri, F. Dellaert, M. Fallon. “Learning Inertial Odometry for Dynamic Legged Robot State Estimation” 5th Annual Conference on Robot Learning (CoRL) 2021.
Deep Inertial Estimation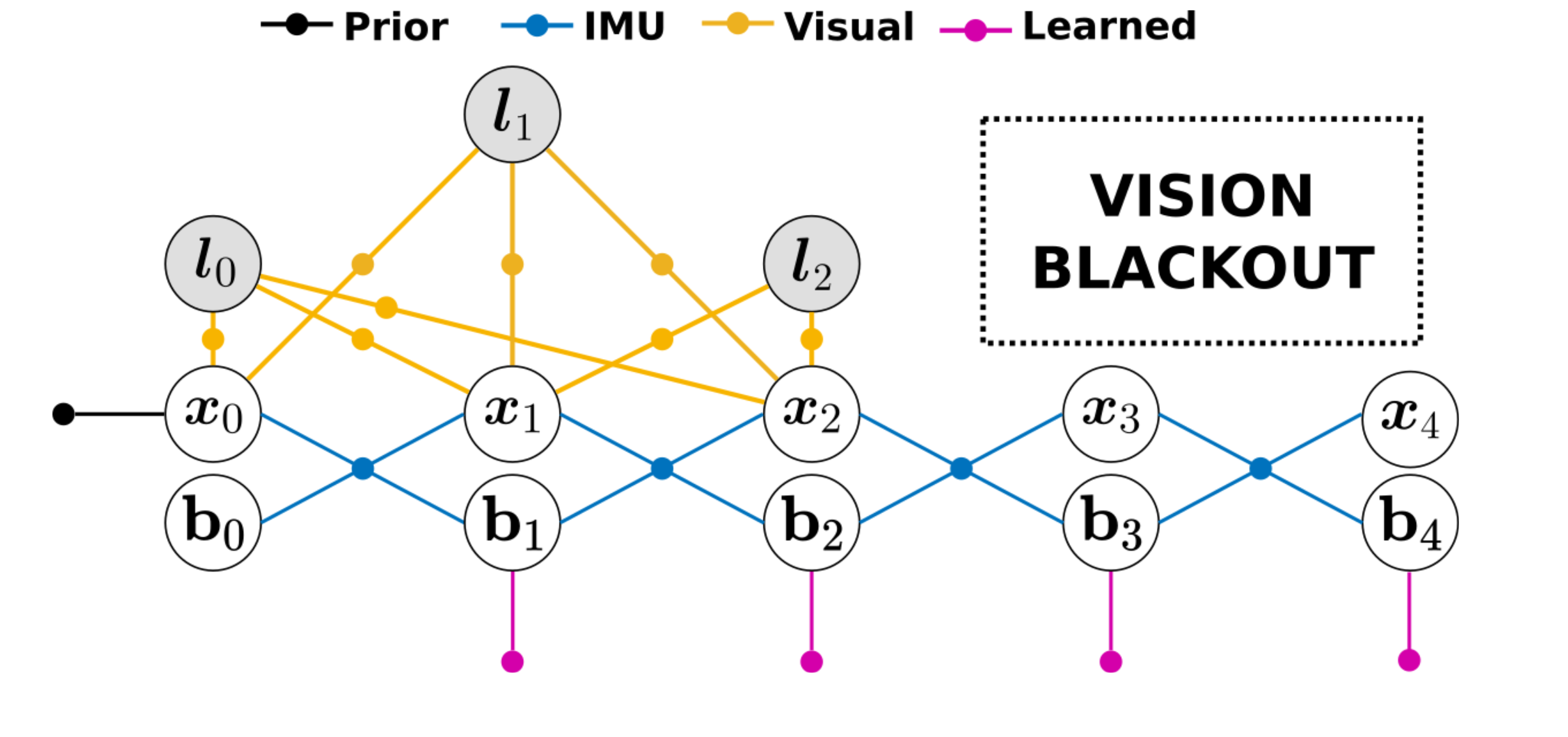
Haptic Localisation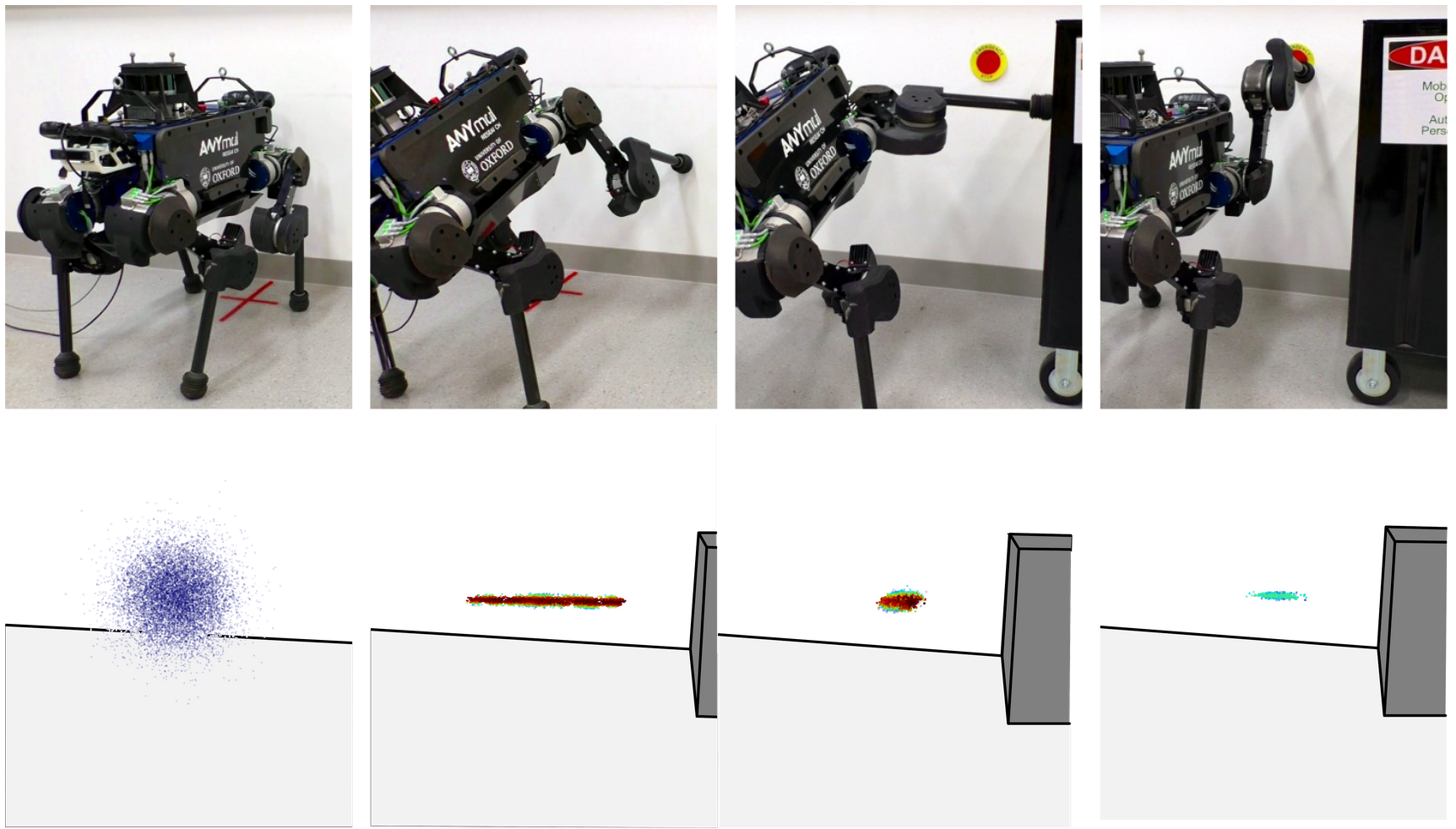
Team CERBERUS - 1st place winners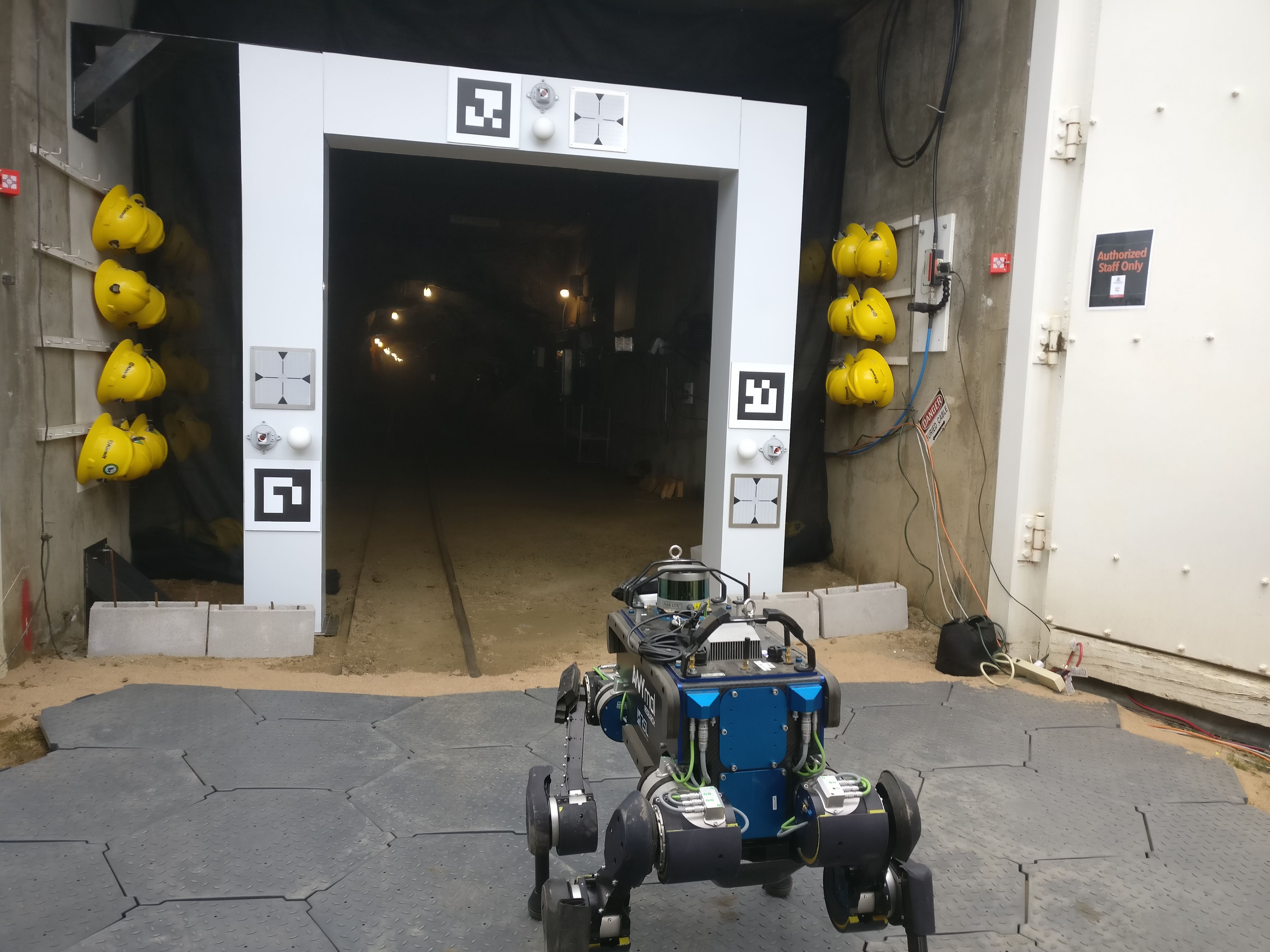
Masters thesis with the CSIRO
Student Underwater Robotics Team.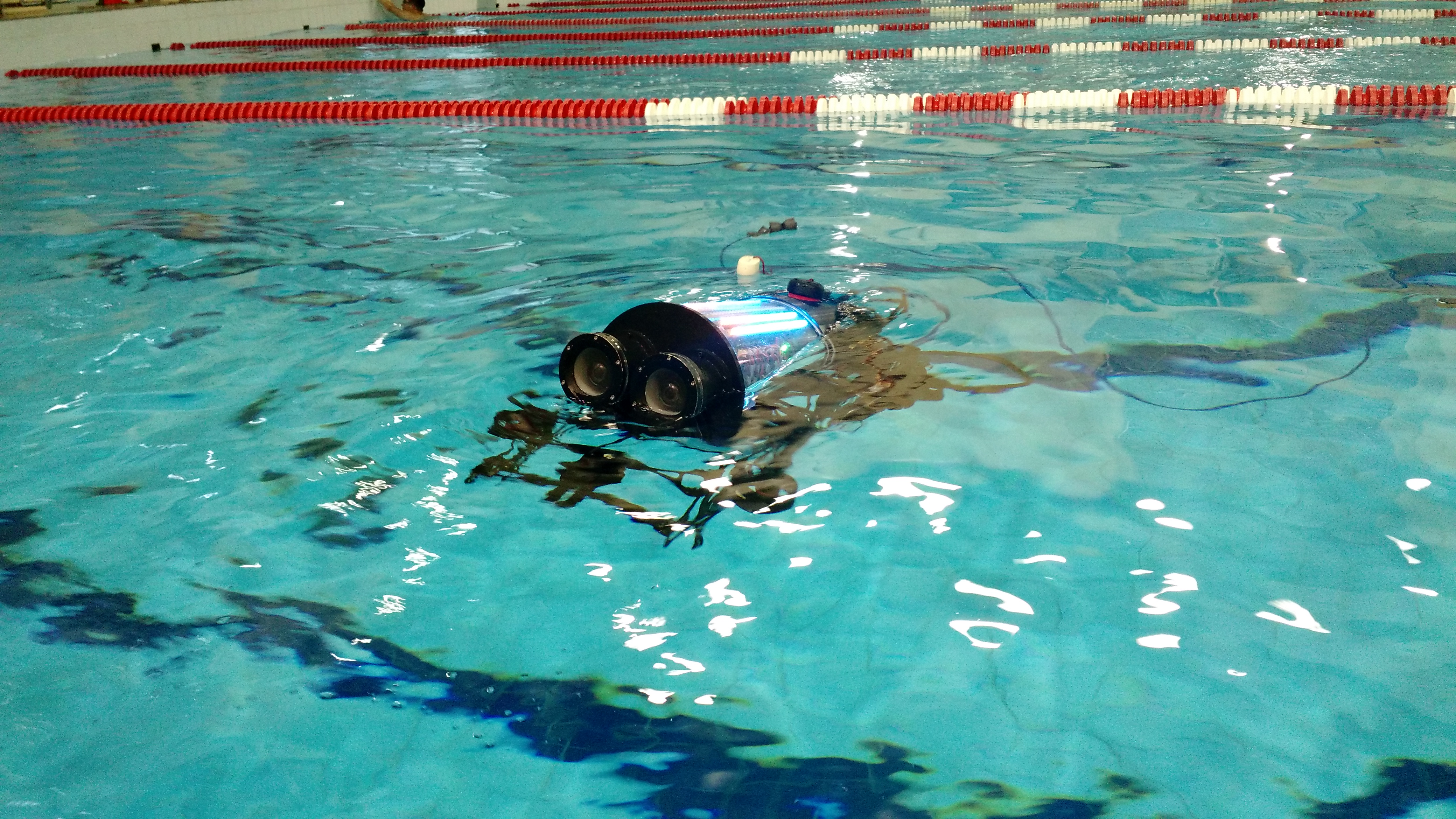
R. Buchanan, T. Bandyopadhyay, M. Bjelonic, L. Wellhausen, M. Hutter and N. Kottege, "Walking Posture Adaptation for Legged Robot Navigation in Confined Spaces," in IEEE Robotics and Automation Letters, vol. 4, no. 2, pp. 2148-2155, April 2019. https://ieeexplore.ieee.org/document/8642939
H. Kolvenbach, D. Wisth, R. Buchanan, G. Valsecchi, R. Grandia, M. Fallon, and M. Hutter, “Towards autonomous inspection of concrete deterioration in sewers with legged robots, J Field Robotics. 2020; 1-4 https://onlinelibrary.wiley.com/doi/abs/10.1002/rob.21964
R. Buchanan, L. Wellhausen, M. Bjelonic, T. Bandyopadhyay, N. Kottege and M. Hutter, "Perceptive Whole Body Planning for Multi-legged Robots in Confined Spaces,". J Field Robotics. 2020; 1-17 https://onlinelibrary.wiley.com/doi/10.1002/rob.21974
M. Tranzatto, [...] R. Buchanan, [...] K. Alexis, "CERBERUS: Autonomous Legged and Aerial Robotic Exploration in the Tunnel and Urban Circuits of the DARPA Subterranean Challenge". Field Robotics 2021. https://www.research-collection.ethz.ch/handle/20.500.11850/489726
R. Buchanan, J. Bednarek, M. Camurri, M. R. Nowicki, K. Walas, M. Fallon. Navigating by touch: haptic Monte Carlo localization via geometric sensing and terrain classification. Autonomous Robot 45, 843–857 (2021). https://link.springer.com/article/10.1007/s10514-021-10013-w
R. Buchanan, V. Agrawal, M. Camurri, F. Dellaert, M. Fallon. Deep IMU Bias Inference for Robust Visual-Inertial Odometry With Factor Graphs. Robotics and Automation Letters vol. 8, no. 1, pp. 41-48, Jan. 2023. https://link.springer.com/article/10.1007/s10514-021-10013-w
Oxford Sparks Q&A 
ETH Zürich - Teaching Assistant
University of Oxford - Departmental Tutor