Learning and Perception for Legged Robots
See a map of all the places I've worked!
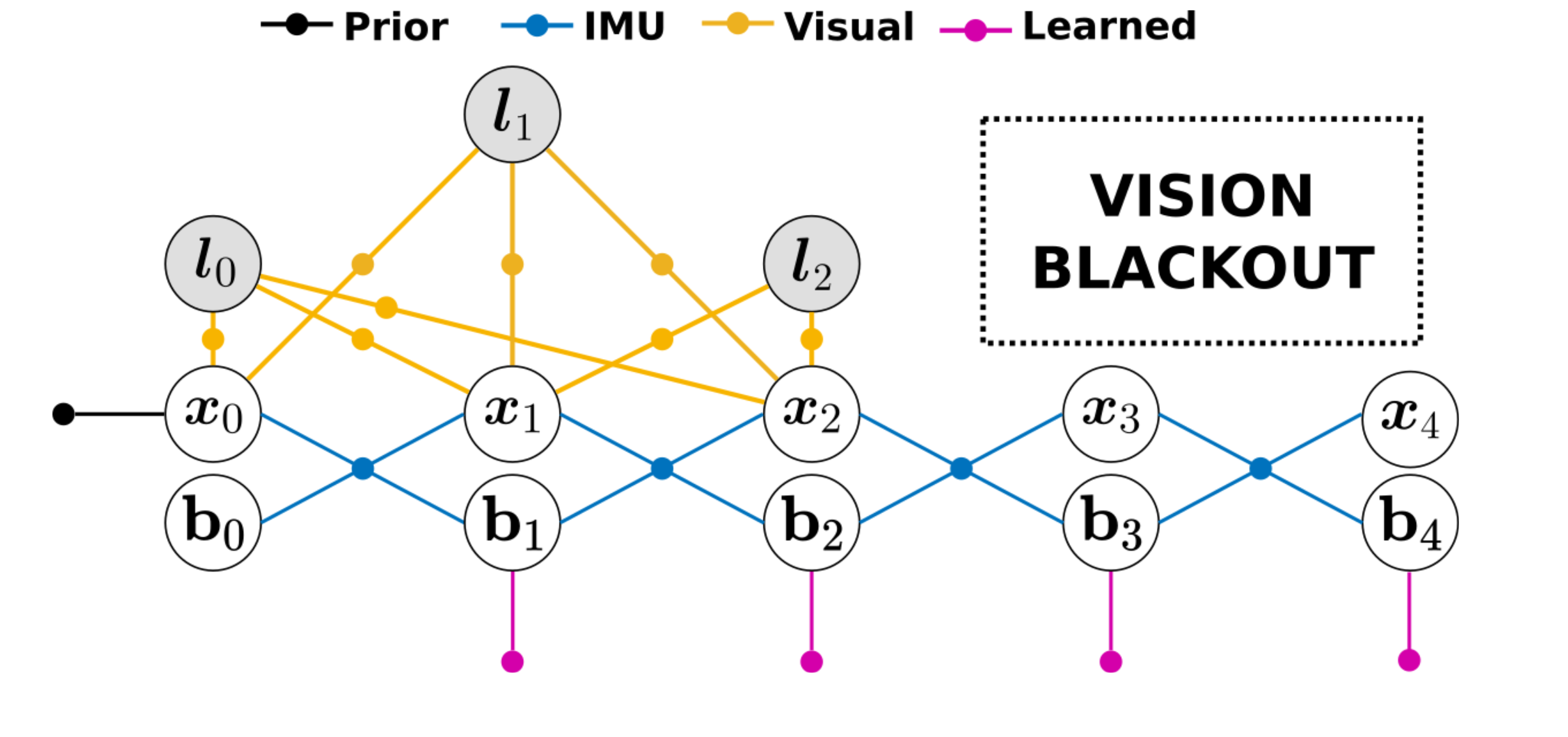
Deep Inertial Estimation
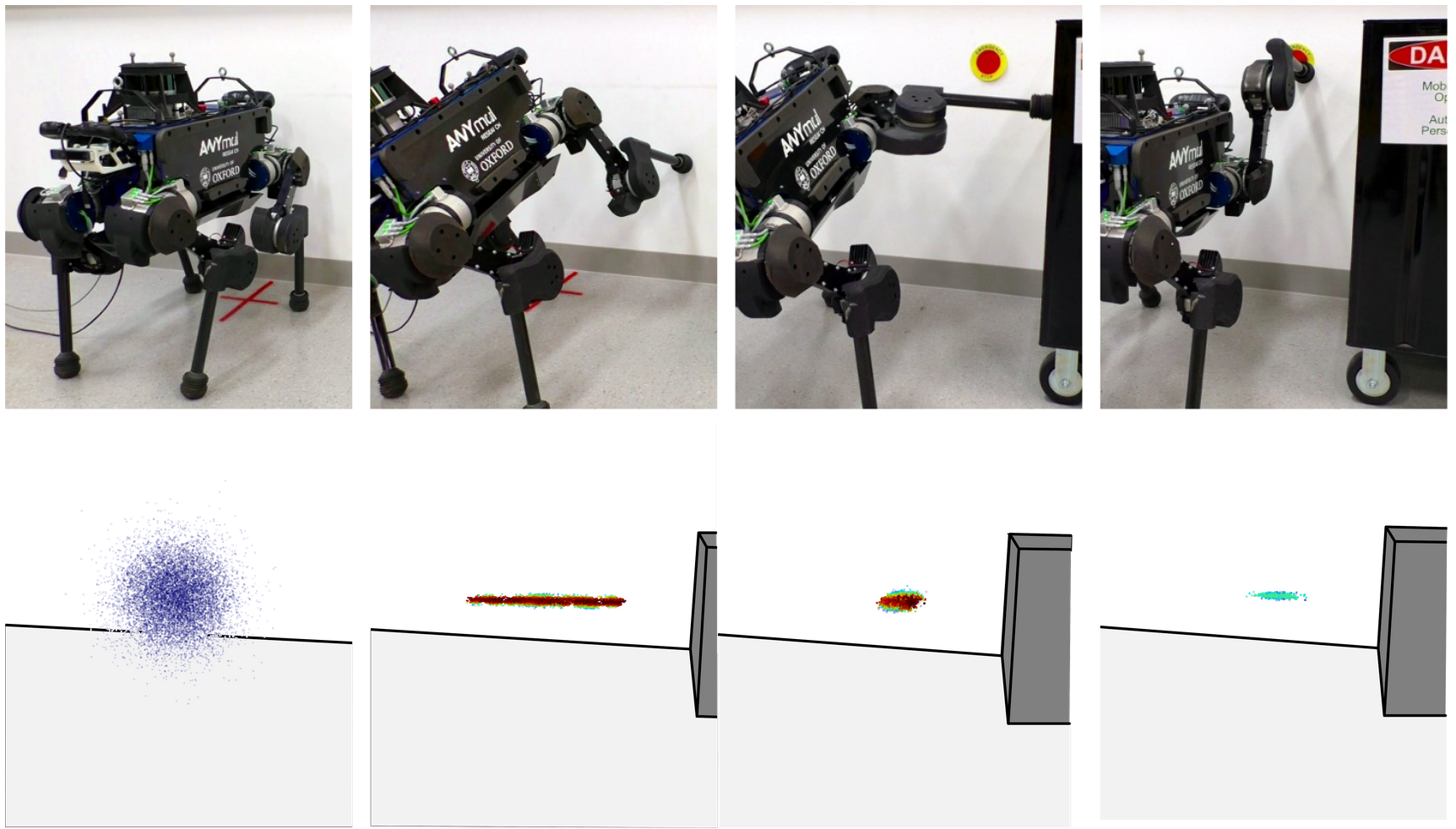
Haptic Localisation
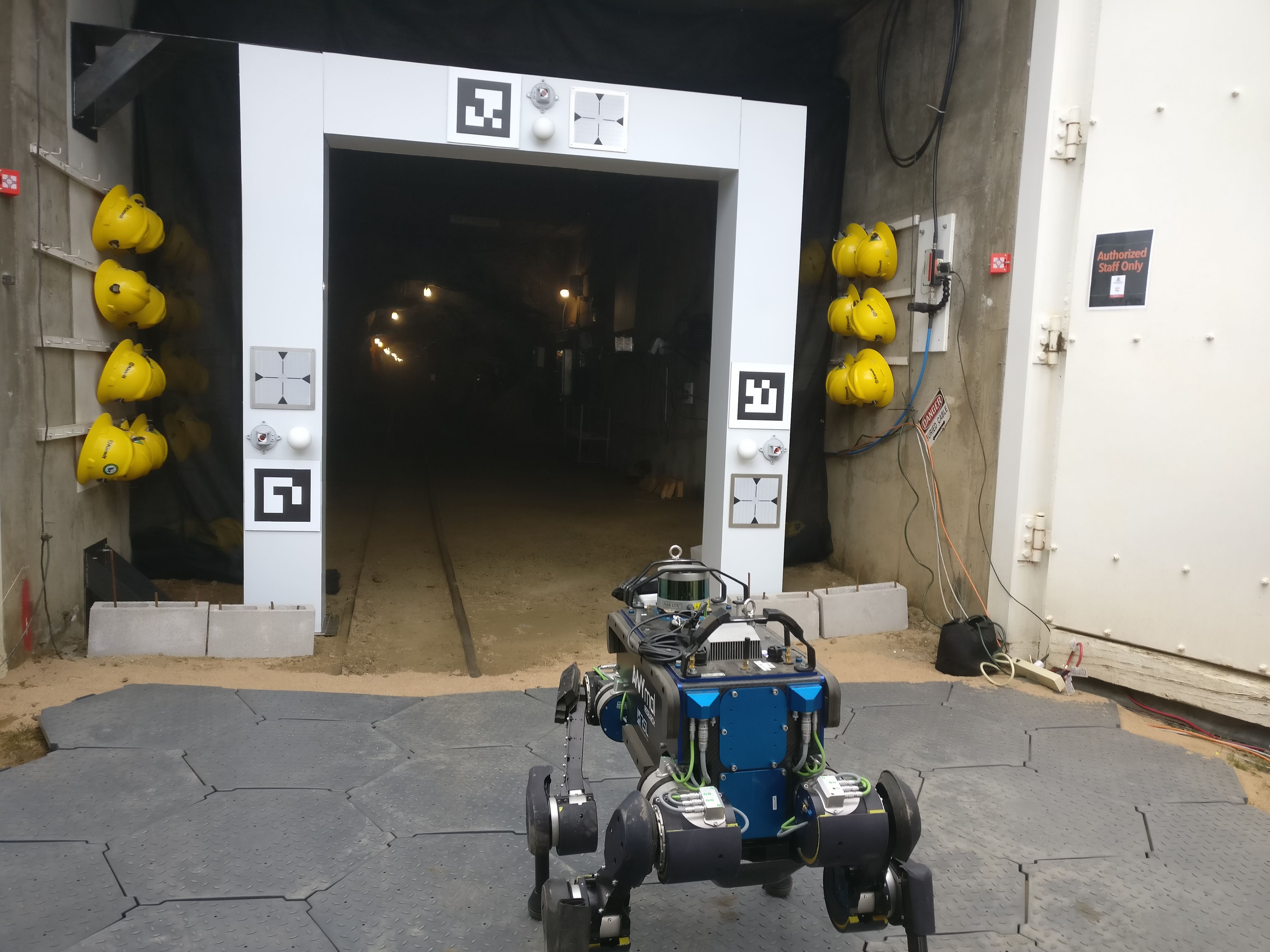
Team CERBERUS - 1st place winners
Masters thesis with the CSIRO
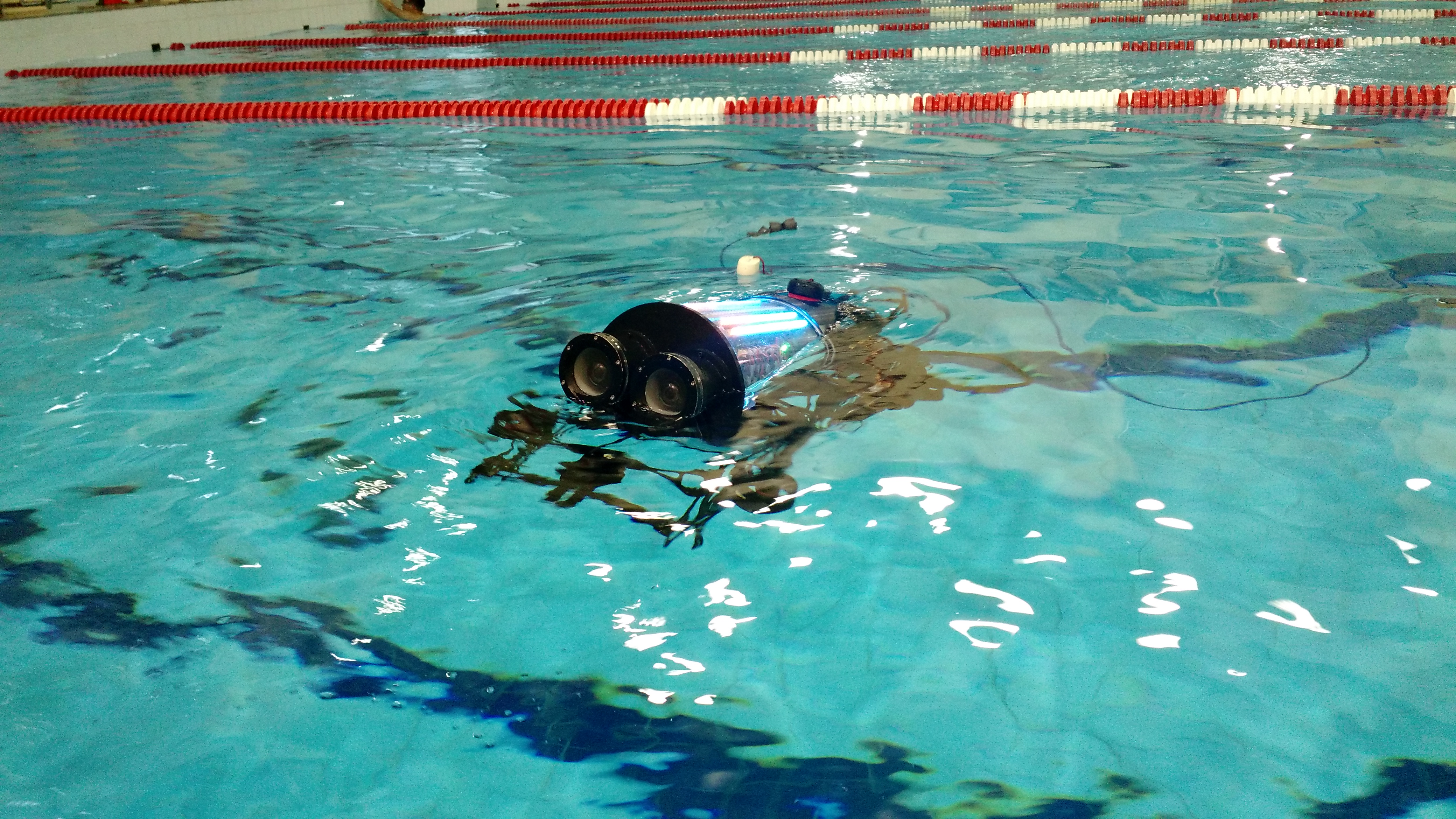
Student Underwater Robotics Team.